
 |
| image source |
Nicholas West
Activist Post
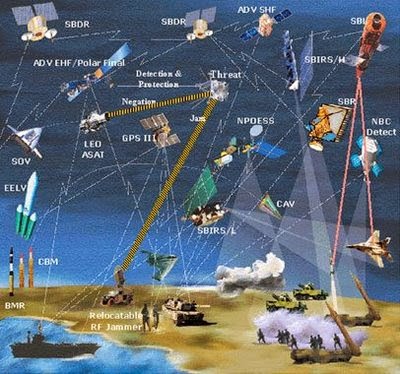
The U.S. military continues to seek ways to integrate combat systems into one seamless matrix of full spectrum dominance.
In September 2011, Activist Post reported on a project called MUSIC – a fusion of aerial and ground robotics with other manned systems that could extend across the different branches of the military – Army, Air Force, Marines, and Navy.
Most troubling is that MUSIC was intended to be directed either by a single operator, or the final goal of being fully autonomous. It is part and parcel of the concept that originally embodied Future Combat Systems.
For a perfect look as what full-spectrum dominance really means, here are their words:
The FCS is envisioned to be an ensemble of manned and potentially unmanned combat systems, designed to ensure that the Future Force is strategically responsive and dominant at every point on the spectrum of operations from non-lethal to full scale conflict. FCS will provide a rapidly (C-130) deployable capability for mounted tactical operations by conducting direct combat, delivering both line-of-sight (LOS) and beyond-line-of-sight (BLOS) precision munitions, providing variable lethal effect (non-lethal to lethal), performing reconnaissance, and transporting troops. Significant capability enhancements will be achieved by developing multi-functional, multi-mission and modular features for system and component commonality that will allow for multiple state-of-the-art technology options for mission tailoring and performance enhancements. The FCS force will incorporate and exploit information dominance to develop a common, relevant operating picture and achieve battlespace situational understanding.
This program was canceled, due in part to energy challenges for keeping the aerial components of the system aloft for long periods of time, but has since morphed into other programs for theoretical continuance. Newer research aims to explore ideas such as using laser energy and solar drones.
Another new concept focuses on the aspects of drone-to-robot communications between their different spheres. A team at Yonsei University, Korea summarizes the core challenges:
UGV (Unmanned Ground Vehicle – Ed.) operation can be impeded by a reliance on line-of-sight sensing, as their on-board sensors cannot see what is beyond obstacles around them. This can significantly slow down exploration applications. Unmanned aerial vehicles (UAVs), on the other hand, can quickly obtain an overview of large areas, but cannot match UGVs for endurance, load carrying or up-close investigation of the surface, such as collecting soil samples.
There are clear advantages to combining the use of both types of vehicle in a UGV/UAV cooperative system, an example of a heterogeneous multi-agent system. Creating such a system requires solutions to three main challenges: sensor technology to robustly detect and identify all the agents (UGVs and UAVs); precise relative positioning between the agents even where GPS is not available or reliable; and efficient communication between the agents.
 Researchers cite advances in the structure of imaging technology that could provide a non-GPS, non-sensor solution for integrating drones and robots into one overall sphere of communication. Readers interested in full details can access the full press release link below.
Researchers cite advances in the structure of imaging technology that could provide a non-GPS, non-sensor solution for integrating drones and robots into one overall sphere of communication. Readers interested in full details can access the full press release link below.
Naturally, as with nearly all of these types of academic press releases, they cite potential benefits while downplaying or ignoring greater negative impacts. In this case, researchers cite applications in RoboFarming for better crop data collection and analysis. Then, a small note about the obvious military applications.
The initial motivation of the work was polar exploration, but there are many applications that could benefit from the approach, as team member Prof. Jiwon Seo explained: “We are also working on precise farming applications according to a research request from a Korean company. The role of UAVs in this case is not just limited to obstacle detection. UAVs equipped with multi-spectral imaging sensors can collect useful information on crops over a large farming area. Based on this information, unmanned tractors could operate more efficiently. As a longer-term development, the system can be applied to emergency patient transport and military applications.” (emphasis added)
The team concludes with projections for a more “cooperative future” including “intelligent robots, IoT (Internet of Things – Ed.) devices, and media art applications.” Given what we know about the concerns voiced over the potential for killer robots and the arrival of a Superintelligence, the future could be anything but cooperative, at least for humans – it’s likely to be more about dominance.
The bottom line is that the pieces continue to be built and assembled into place that could usher in the arrival of a full Skynet-type system. Any development that enables that reality must be condemned and met with full-spectrum resistance.
Source: The Institution of Engineering and Technology
Recently by Nicholas West:
- World’s First Wearable Drone Takes Flight
- New Brain Tech Reveals Past Thoughts and Memories
- 3D-Printed Military Drone Takes Flight

Be the first to comment on "War Matrix: New System Enables Drones and Robots to Work Together"